























Alternative Navigation
Tailoring radar systems to the unique requirements of different applications
Alternative navigation offers a valuable lifeline in environments where traditional global navigation satellite systems (GNSS) are ineffective or unavailable.
Using tools and techniques ranging from simple inertial sensors found in smartphones to cutting-edge quantum gravity mapping, alternative navigation keeps everything on track underground, underwater, indoors and in urban canyons, and even in space.
Inertial navigation, visual scene matching, and acoustic or electromagnetic localisation are all examples of alternative navigation methods which allow systems to understand their location when GNSS is not available or is degraded.
The Plextek advantage

- Signal processing
Processing sensor data, such as accelerometers and gyroscopes, to estimate motion of a platform.
- Radio Frequency (RF) geolocation
Advanced RF geolocation techniques for detecting and locating objects, relying on years of experience in hardware development, antenna design and embedded signal processing.
- Electronics design
Delivering the intelligence that makes products work.
- Low size, weight, power and cost (SWAP-C)
Taking devices and optimising for embedded applications or designing custom hardware solutions for applications.
- Artificial Intelligence (AI) and Machine Learning (ML)
Specialising in their application to RF, embedded hardware design and signal processing.
Recent advancements in machine learning and sensor technology provide us with the tools for developing robust and precise alternative navigation methods – ensuring continuity and reliability in even the most complex of environments where GNSS signals are unreliable.

Freddy Saunders
Senior Data Scientist
Alternative navigation capabilities
Navigating in areas where GNSS is degraded or unavailable usually requires expensive, specialised equipment. The challenge for the Plextek team was to create an accurate and low-cost alternative navigation system to enable a person to navigate accurately in the absence of GNSS.
The result was a system that attaches to a user’s boot and provides a highly accurate and robust position estimate when GNSS is ineffective or unavailable – inside buildings or tunnels, for example, or in an active GPS-denied environment.
The underpinning hardware and navigational algorithms offer low-drift alternative navigation capabilities in the event of GNSS signal loss. Read more: Alternative PNT
Developing an alternative navigation sensor
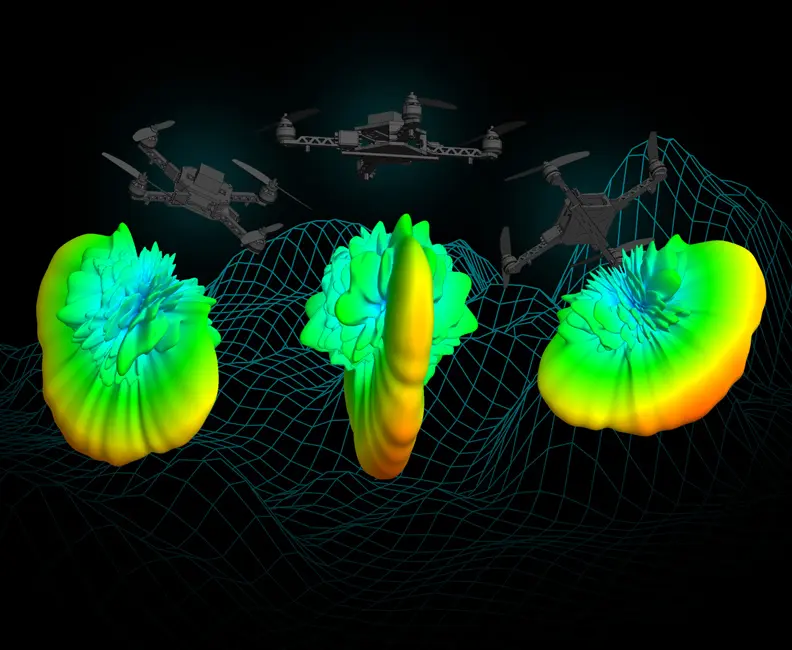
Autonomous Drones are increasing being used for a wide variety of applications but are generally heavily reliant on GNSS for navigation. Our challenge was to develop an alternative navigation sensor suitable for drones that could provide a GNSS-free navigation capability in all-weather day and night, and suitably small and low power.
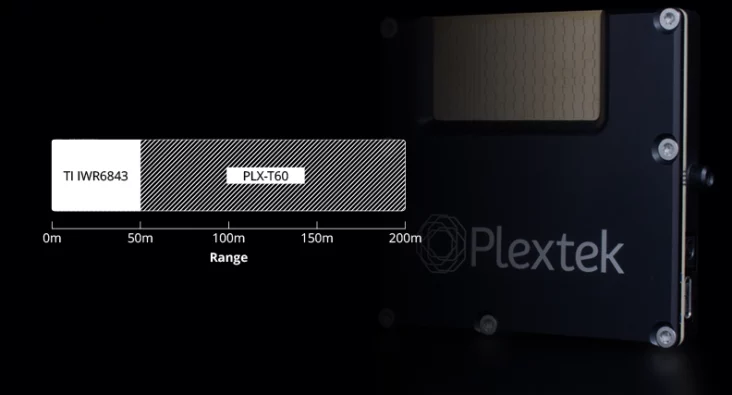
In response Plextek developed a proof-of-concept terrain referenced navigation (TRN) system using our miniature PLX-T60 radar. It compares the elevation profile of the ground beneath the drone to a digital elevation map to estimate the Drone’s location when GNSS is degraded or unavailable.
Use of radar is advantageous as, unlike camera technology, it can work equally well day and night and is not affected by inclement weather such as rain or fog. Read more on Augmenting UAV Safety with Ubiquitous Radar Technology.
ML techniques with Semantic segmentation
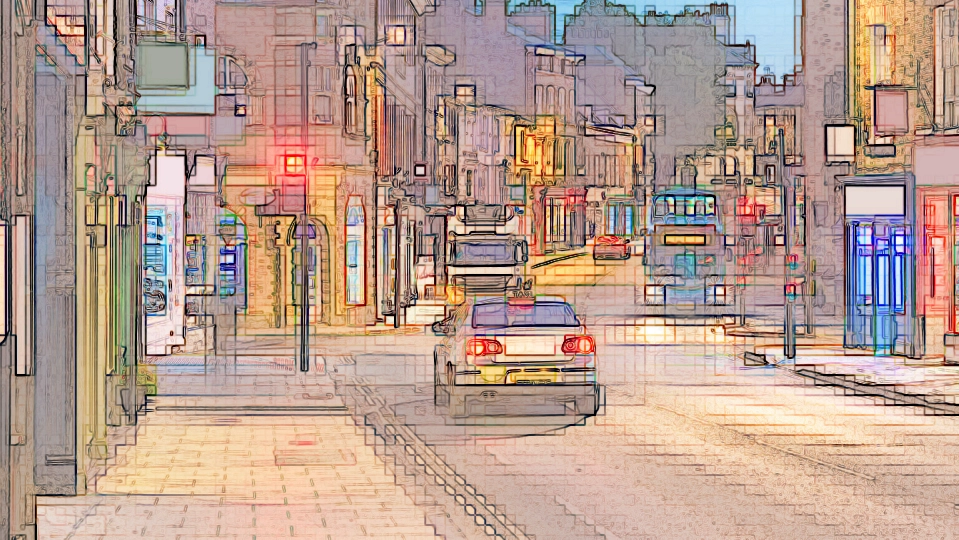
The challenge from the client was to take image retrieval to the next level – improving the performance of traditional visual scene matching (VSM) algorithms at finding the best matching image in a dataset of georeferenced images.
The Plextek team decided to augment the traditional VSM algorithms with one of the latest ML techniques – Semantic segmentation. This was used to assign a label to each pixel in an image, based on which category it belonged to – tree, person, vehicle, etc. This enabled the VSM algorithm to prioritise those features which are likely to remain consistent over time (such as buildings) over those that are likely to change (e.g. cars, vegetation). The result is a VSM algorithm that can more accurately estimate a system’s location by comparing imagery from a camera with a database of previously captured images. Read more on Semantic Segmentation in Visual Scene Matching.
What sets us apart when it comes to alternative navigation?
The Plextek team has a track record of delivering complex technology solutions covering a broad range of alternative navigation applications, including:
- Indoor
- Urban canyons
- Underground/underwater
- Military operations (GNSS denied)
- Space
Examples of our alternative navigation methods include:
- Computer vision
- Visual scene matching
- Radar terrain profile matching
- Simultaneous localisation and mapping (SLAM)
- Dead reckoning (inertial sensors)
- Acoustic localisation
- Electromagnetic localisation


Contact Us

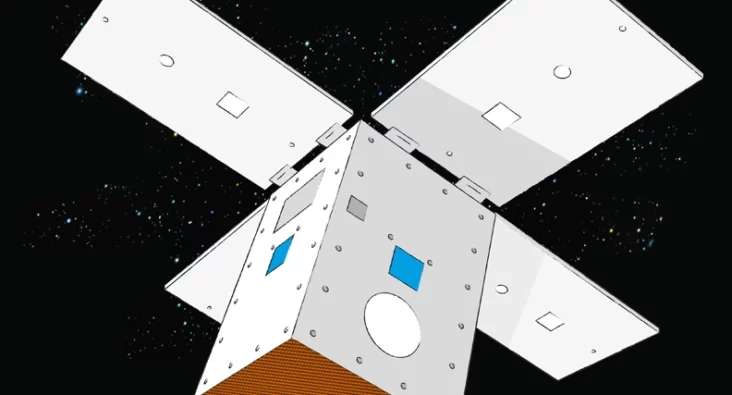
Seeing Clearly in Orbit: The Turning Point for Space Radar
Richard Jacklin explores why 2026 is a turning point for compact radar in space, covering SAR, debris detection, 6G NTN communications and the UK skills gap.

Radar in Modern Sensing: The Power of Sensor Fusion
Radar Sensor Fusion with Cameras and Lidar: Enhanced Sensing Technology for Autonomous Systems

mmWave radar: balancing resolution and practicality in space
mmWave radar offers the ideal balance for space applications, detecting small debris and spacecraft features with minimal power and no moving parts.
Beyond policy: how industry must deliver ESA’s Zero Debris Vision
Space needs to be kept clean, and this is becoming increasingly hard as commercial and defence activities ramp up.

How radar works
How Does Radar Work? Understanding Radar Technology and Applications with Richard Jacklin

Why radar should be on your radar
Space missions demand sensors that work in brutal conditions - and radar works when everything else fails.

Addressing the Escalation in GNSS Spoofing with Data Fusion
Plextek's data fusion technology helps maritime vessels maintain navigation accuracy during increasing GNSS spoofing attacks.

Driving Radar Innovation for Space in the CLEAR Mission
Plextek Supports ClearSpace in Completing Phase 2 of Mission CLEAR, Strengthening UK’s Leadership In Orbit Services.

Why Radar is Becoming Essential in Mission Assurance
Recent high profile reports of lunar lander failures due to loss of altitude and doppler sensing data show the necessity for a suite of sensors, making radar now essential for mission assurance.

Measuring Micro-Debris in LEO with Next-Gen Space Radar
Detecting micro-debris in real-time is key to safer space operations. Next-gen mmWave radar technology enables high-resolution tracking of even the smallest fragments in LEO, reducing collision risks and enhancing space situational awareness. Discover how this innovation supports a more sustainable orbital future.
Optimizing mmWave radar capabilities with Texas Instruments
Plextek and Texas Instruments: Optimizing mmWave radar capabilities to solve key design challenges

Augmenting UAV Safety with Ubiquitous Radar Technology
Enhancing UAV safety with ubiquitous radar tech for detect and avoid capabilities in shared airspace.
Using AI to Detect and Classify RF Signals in a Congested Environment
Developing AI-based RF signal classification systems, from algorithm development through to embedded real-time processing solutions
Read More

Concealed object detection for real-time parcel security screening
Concealed object detection for real-time parcel security screening with mmWave sensor design and manufacture, and real-time AI processing
Read More

Game-Changing Radar for the CLEAR Mission
Developing vital radar technology for the CLEAR mission, advancing space debris removal techniques to safeguard operational satellites and spacecraft.
Read More
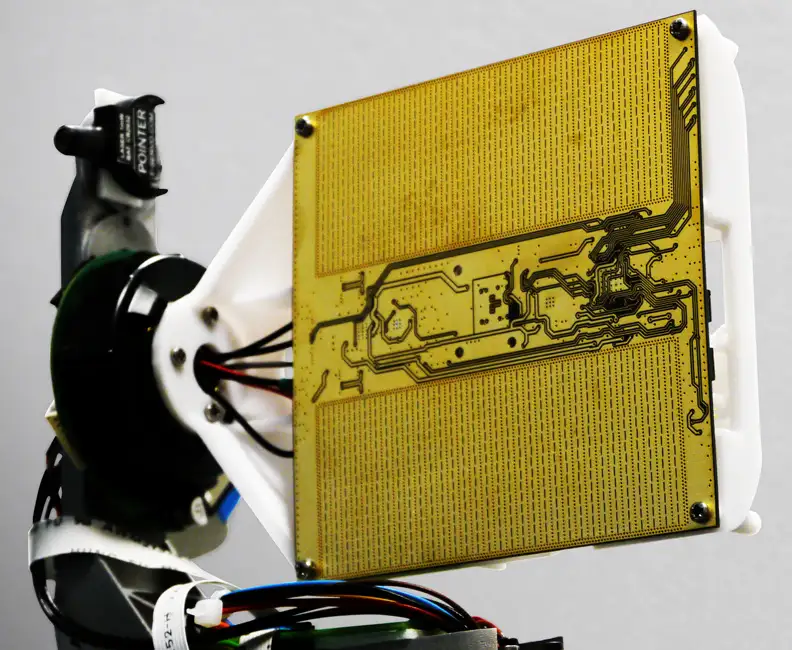
Millimetre-Wave Radar System
Expertly engineering a compact, high-performance 60 GHz millimetre-wave radar system using innovative Substrate Integrated Waveguide technology, achieving significant advancements in target detection up to 100 metres.
Read More

mmWave Radar for Foreign Object Debris Detection
Collaborating with WaveTech to develop an advanced mmWave radar system, enabling the rapid and automated detection of foreign object debris on runways, enhancing safety and operational efficiency at a South Korean airport.
Read More

Surveillance Radar for Comprehensive Threat Detection
Advancing a perimeter surveillance solution with long-range detection and low false-alarm rates, using state-of-the-art Passive Electronically Scanned Array technology for robust and maintenance-free operation in a range of demanding environments.
Read More

Intelligent Mobility
Advancing intelligent mobility by integrating cutting-edge electronic-scanning radar technology to ensure the safe and efficient operation of autonomous vehicles in complex real-world environments.
Read More
Sensing in space
Space holds vast promise. Orbiting satellites have already enabled global communications and allowed us to learn about our planet's climate. This paper will explain radar, how it works, and why it is suited to space applications. It will also discuss considerations for space companies when deploying any sensing technology. There is no one-size-fits-all when it comes to sensing. Our team works with space missions to assess if mmWave radar is right, and where it is, identify optimal configurations, software, and security to deliver against the performance and SWaP-C goals.

mmWave Imaging Radar
Camera systems are in widespread use as sensors that provide information about the surrounding environment. But this can struggle with image interpretation in complex scenarios. In contrast, mmWave radar technology offers a more straightforward view of the geometry and motion of objects, making it valuable for applications like autonomous vehicles, where radar aids in mapping surroundings and detecting obstacles. Radar’s ability to provide direct 3D location data and motion detection through Doppler effects is advantageous, though traditionally expensive and bulky. Advances in SiGe device integration are producing more compact and cost-effective radar solutions. Plextek aims to develop mm-wave radar prototypes that balance cost, size, weight, power, and real-time data processing for diverse applications, including autonomous vehicles, human-computer interfaces, transport systems, and building security.
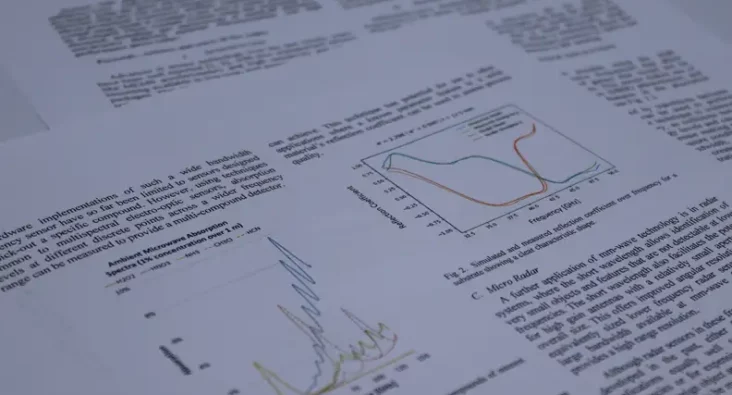
Low Cost Millimeter Wave Radio frequency Sensors
This paper presents a range of novel low-cost millimeter-wave radio-frequency sensors that have been developed using the latest advances in commercially available electronic chip-sets. The recent emergence of low-cost, single chip silicon germanium transceiver modules combined with license exempt usage bands is creating a new area in which sensors can be developed. Three example systems using this technology are discussed, including: gas spectroscopy at stand off distances, non-invasive dielectric material characterization and high performance micro radar.
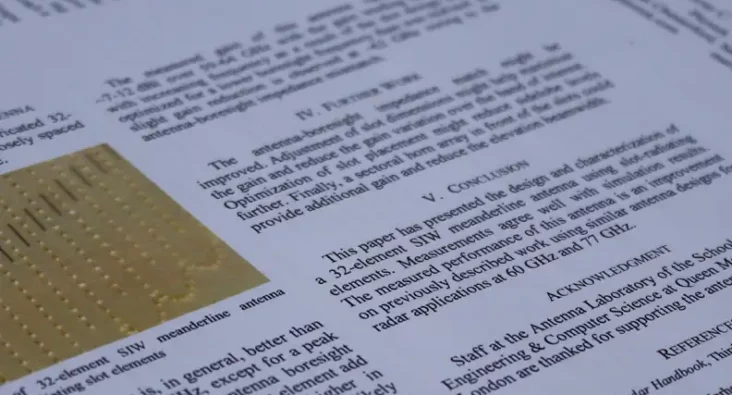
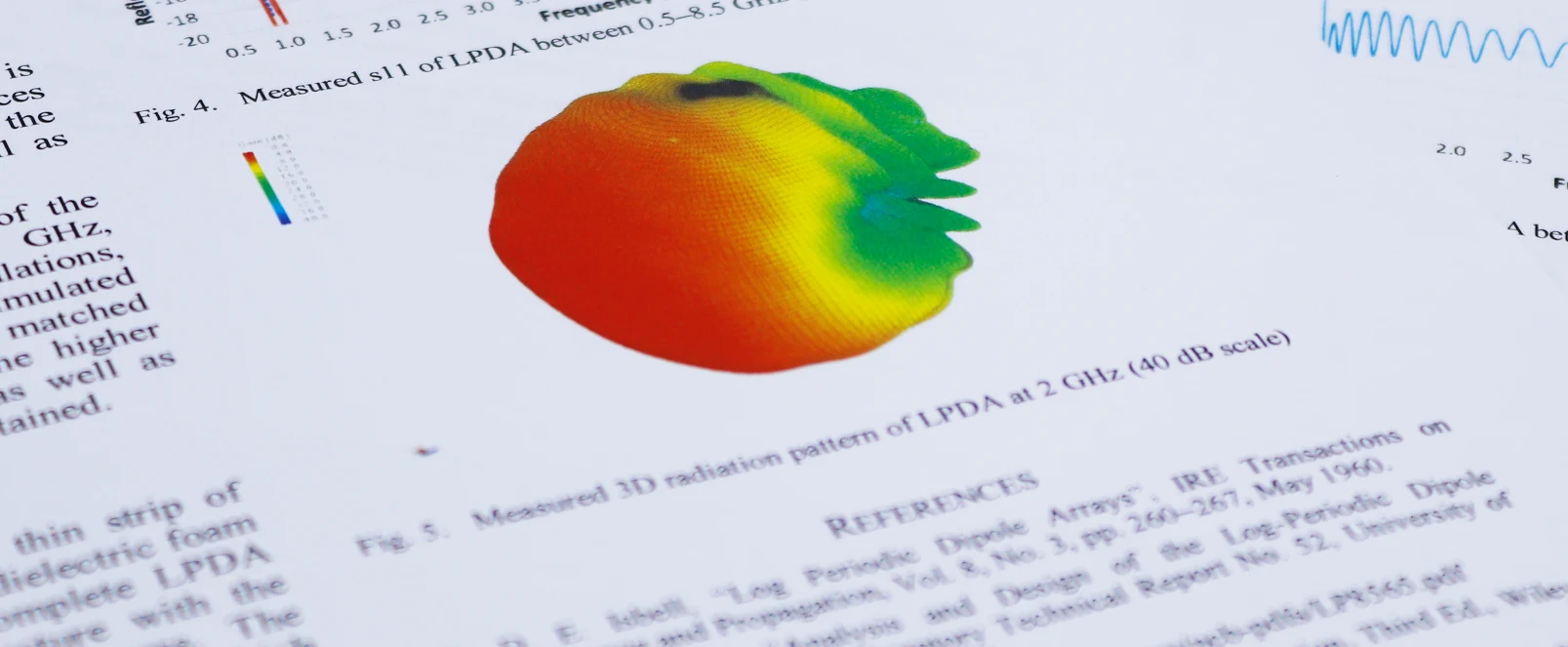
60 GHz F-Scan SIW Meanderline Antenna for Radar Applications
This paper describes the design and characterization of a frequency-scanning meanderline antenna for operation at 60 GHz. The design incorporates SIW techniques and slot radiating elements. The amplitude profile across the antenna aperture has been weighted to reduce sidelobe levels, which makes the design attractive for radar applications. Measured performance agrees with simulations, and the achieved beam profile and sidelobe levels are better than previously documented frequency-scanning designs at V and W bands.
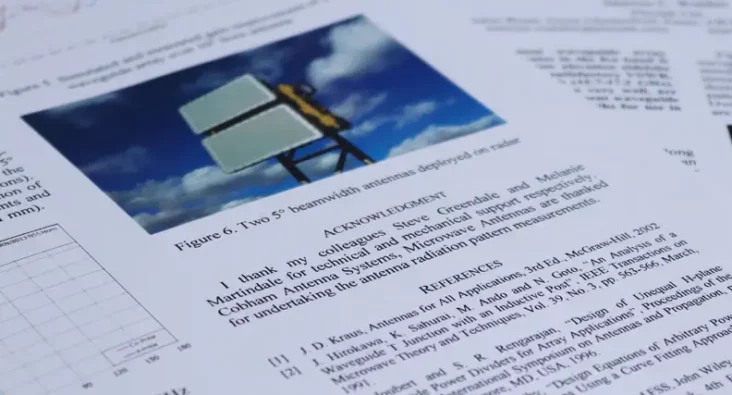
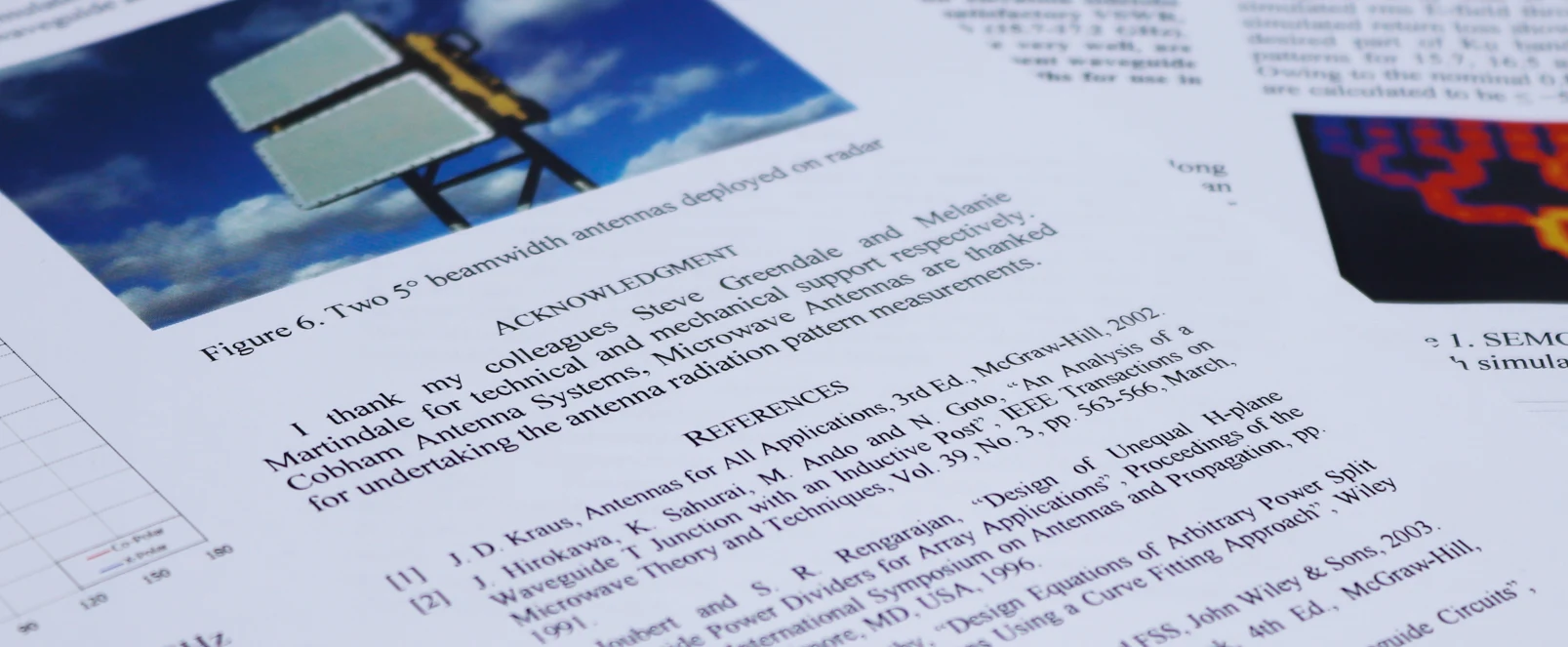
Ku-Band Low-Sidelobe Waveguide Array
The design of a 16-element waveguide array employing radiating T-junctions that operates in the Ku band is described. Amplitude weighting results in low elevation sidelobe levels, while impedance matching provides a satisfactory VSWR, that are both achieved over a wide bandwidth (15.7-17.2 GHz). Simulation and measurement results, that agree very well, are presented. The design forms part of a 16 x 40 element waveguide array that achieves high gain and narrow beamwidths for use in an electronic-scanning radar system.