
















Alternative PNT
Alternative Positioning, Navigation, and Timing
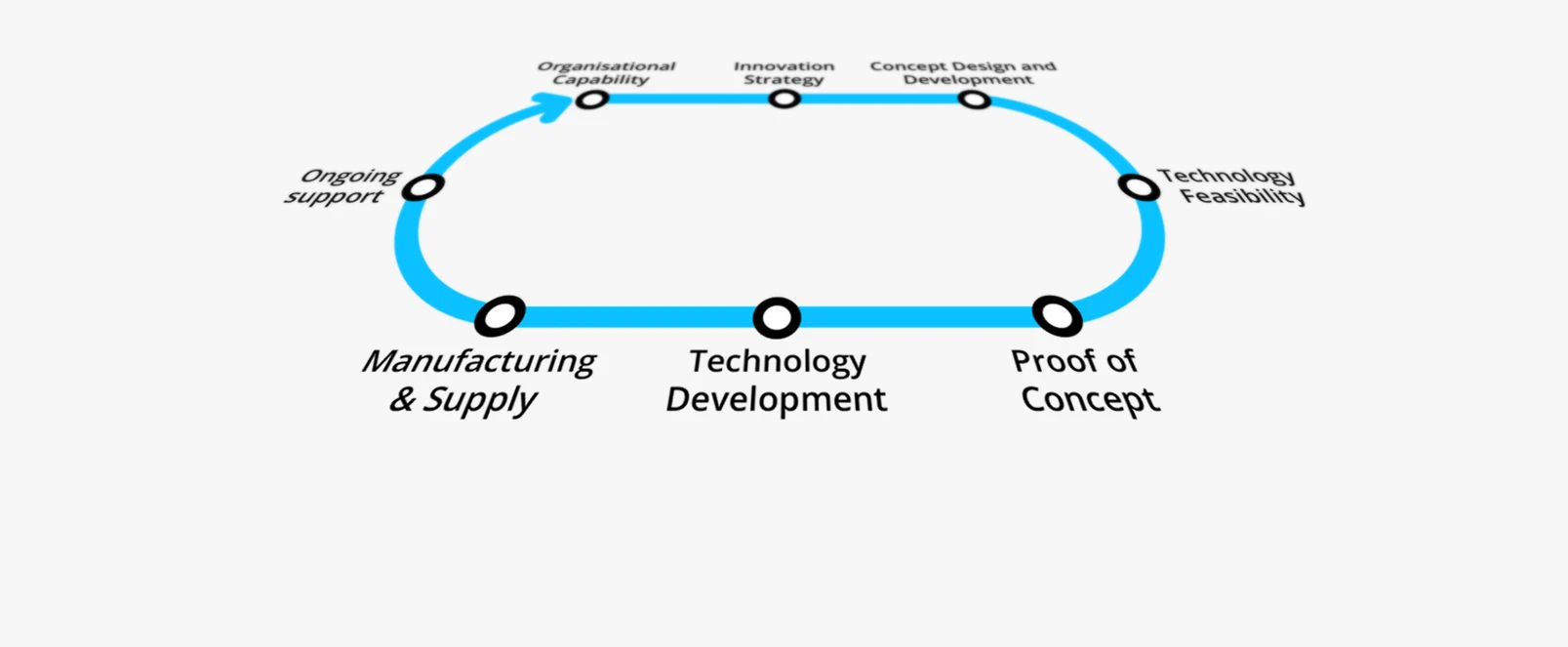
At Plextek, we are at the forefront of technology development, providing engineering design services and consultancy over a wide range of electronics and software systems. As part of our commitment to pushing the boundaries of innovation, we offer specialised Alternative PNT (Alt-PNT) solutions within the Defence sector.
Anchor Node PNT as a Service (PNTaaS)

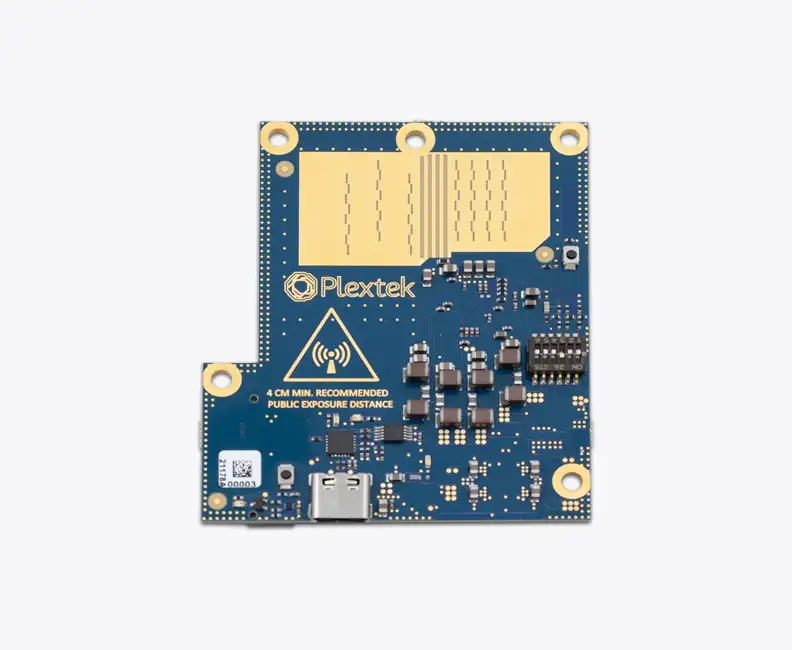
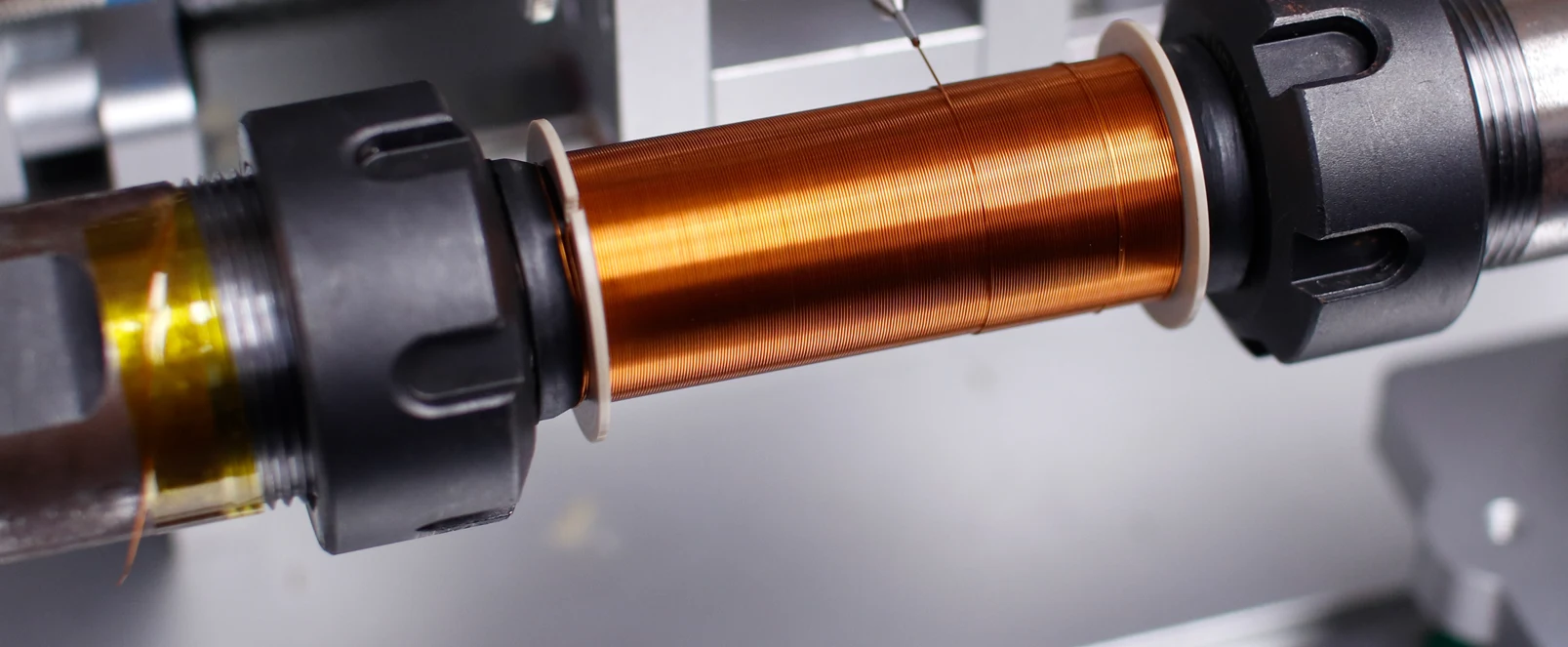
Plextek have developed a system that utilises advanced distributed Time Difference of Arrival (TDoA) to accurately geolocate emitters. The system achieves high levels of synchronisation by using time referenced anchor nodes (or Pseudolites), which act as a non-GNSS timing reference for a network of receiver nodes. These receivers are engineered to process signals from the Anchor Nodes to calculate precise position and time. Anchor nodes offer a PNT solution over a serviced area, enhancing reliability, consistency and the ability to navigate and coordinate without relying on GPS/GNSS.
The Plextek Networked Anchor nodes with known coordinates can be used to help drones and other nodes determine their location within the contested EM environment.
PNT Data Merge / Fusion

We are developing a prototype for an affordable Alt Nav PNT sensor emulator capable of predicting platform performance under varied conditions. This technology encompasses:
- Merging data from different sensor modalities and outputs (GPS, airspeed indicators, visual scene matching, etc.).
- Validating and fusing sensor data based on disparate measurement covariance functions.
- Intelligent weighting of sensors and detection of degradation/spoofing.
Dismounted Position & Navigation Sensor (DPNS)
Please accept cookies in order to enable video functionality.
We developed a boot mounted positioning system providing location estimates to the dismounted user in both GNSS enabled and or degraded denied environments, such as subterranean, under canopy or in building. This self-contained device can be interfaced with systems such as ATAK and maintains low positional error over distance travelled.
The boot-mounted unit shown consists of an array of inertial measurement units. A motion-processing algorithm converts data from the IMU array and barometer into a 3D estimate of displacement relative to an initial start position. The boot-mounted unit forwards this displacement data to the Android smartphone. The Android smartphone then fuses the displacement data from the boot-mounted unit with referenced position data from its GNSS receiver, when it is available, such that when GNSS is lost, the position of the user can be continually estimated from displacement data from the boot-mounted unit alone.
Visual Scene Matching
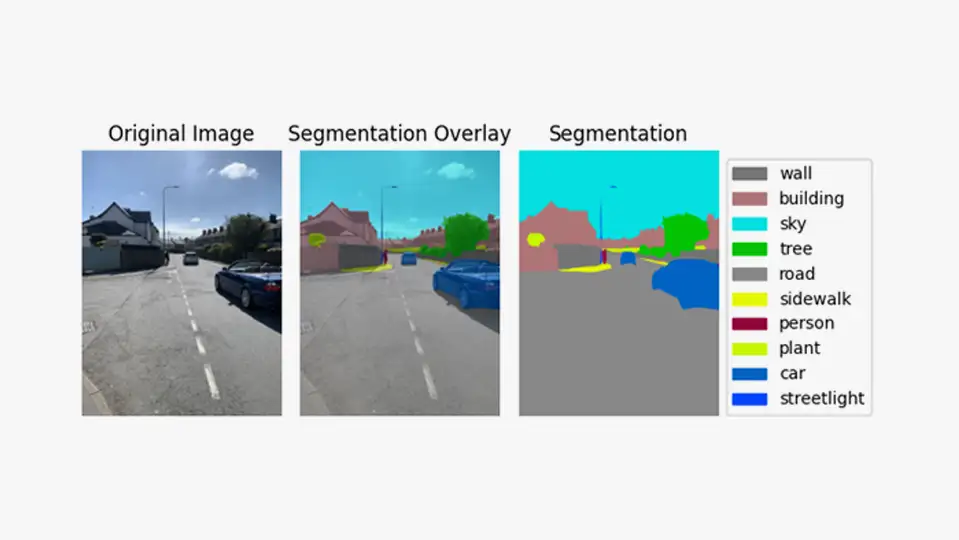
Our visual scene matching solution works by:
- Inferring positions and orientations from georeferenced image databases.
- Using semantic segmentation to identify permanent features.
- Performing image retrieval based on these permanent features.
This cutting-edge approach ensures robust navigation when traditional methods are compromised or unavailable.


Get in touch
Exceptional Engineering


Radar Systems
Communication Systems


Sensor Systems


Data Science


Product Design


Manufacturing